

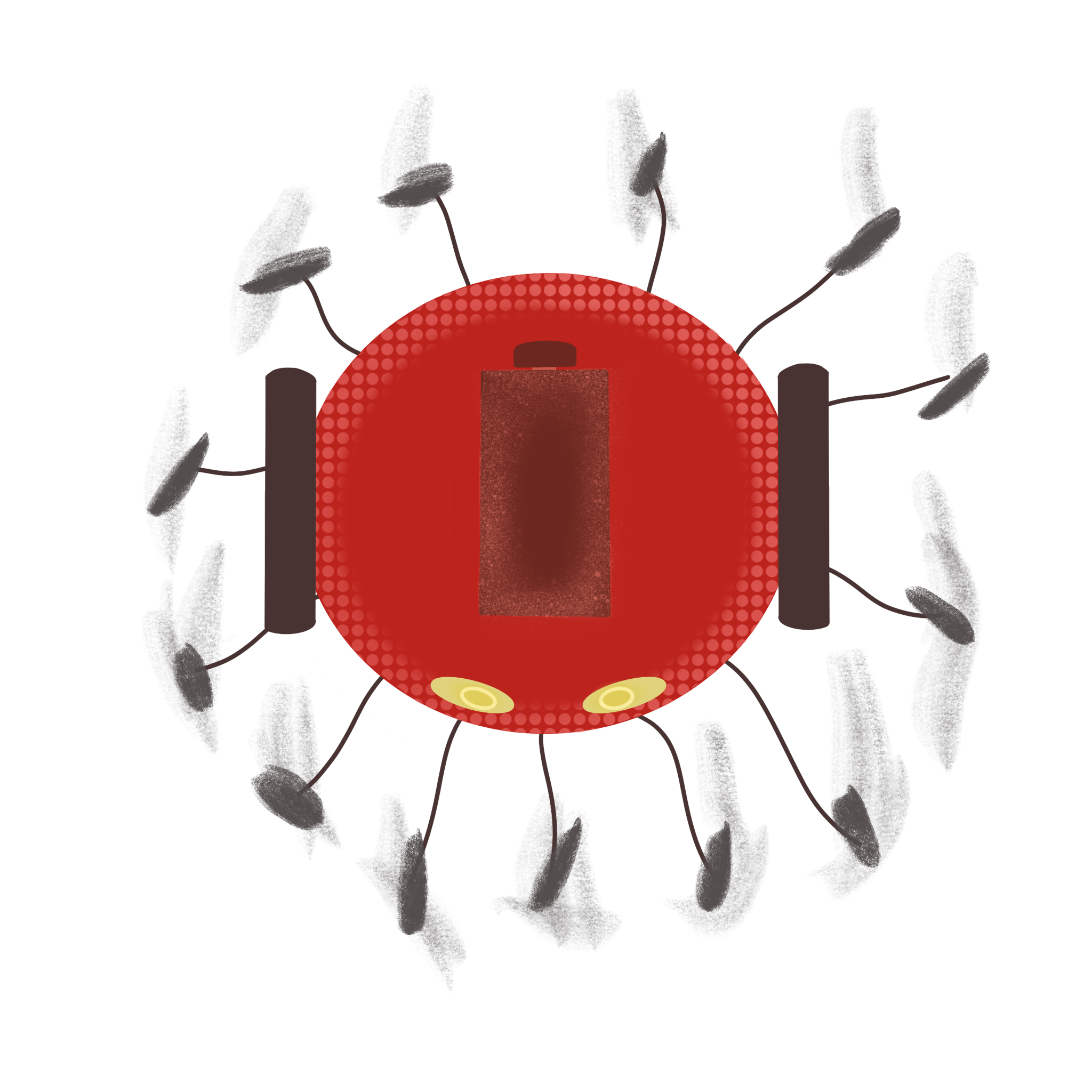
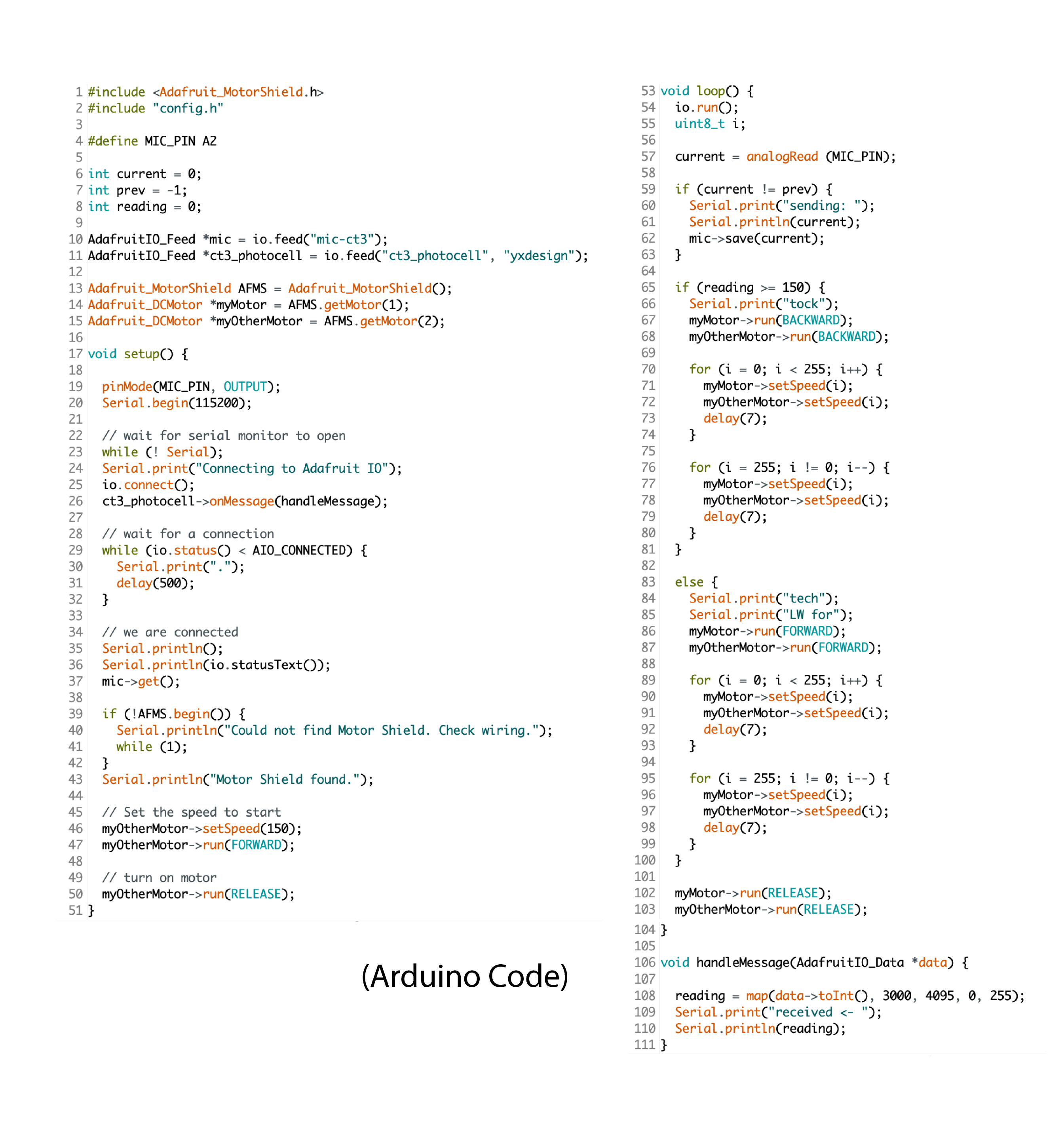

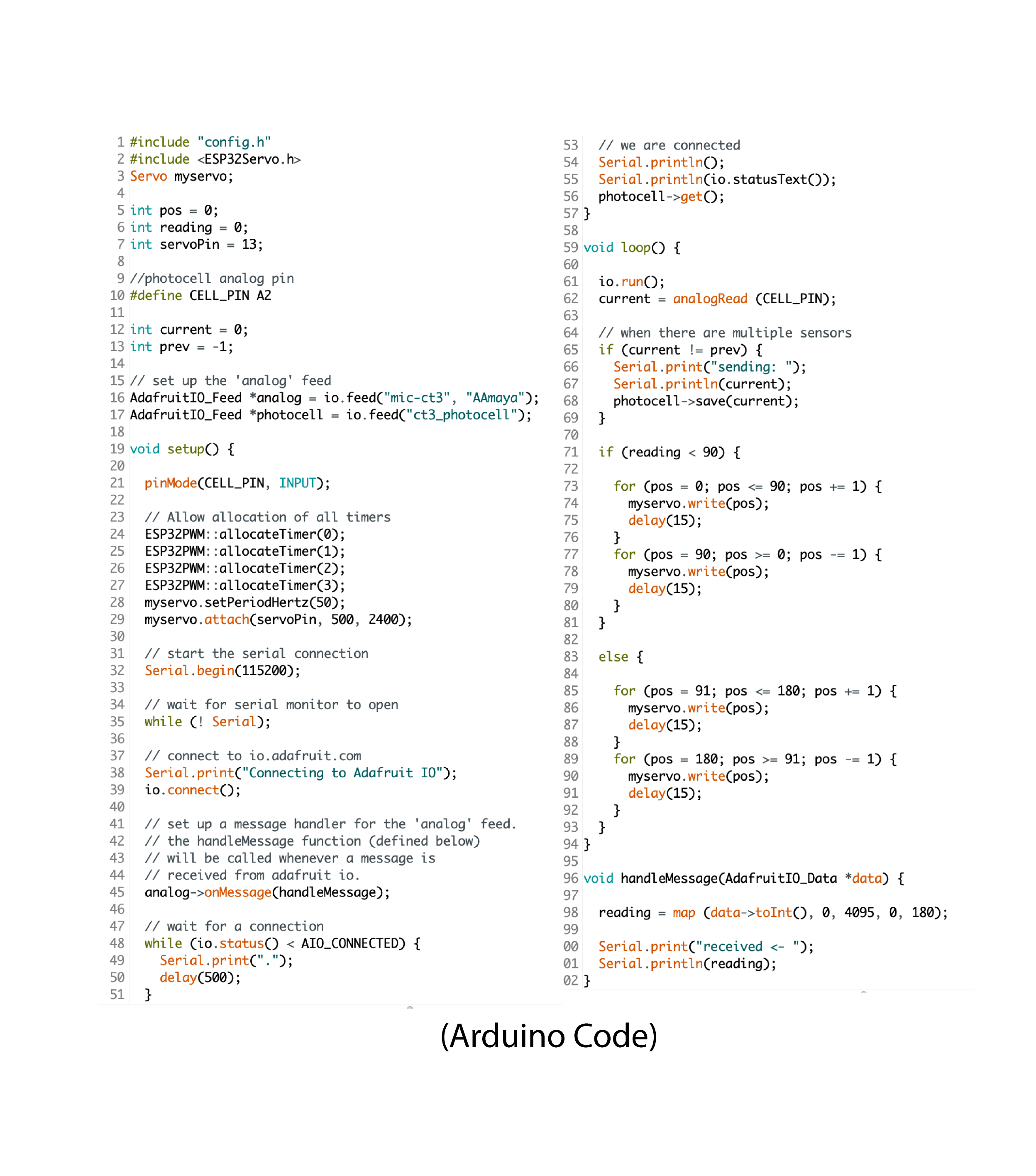
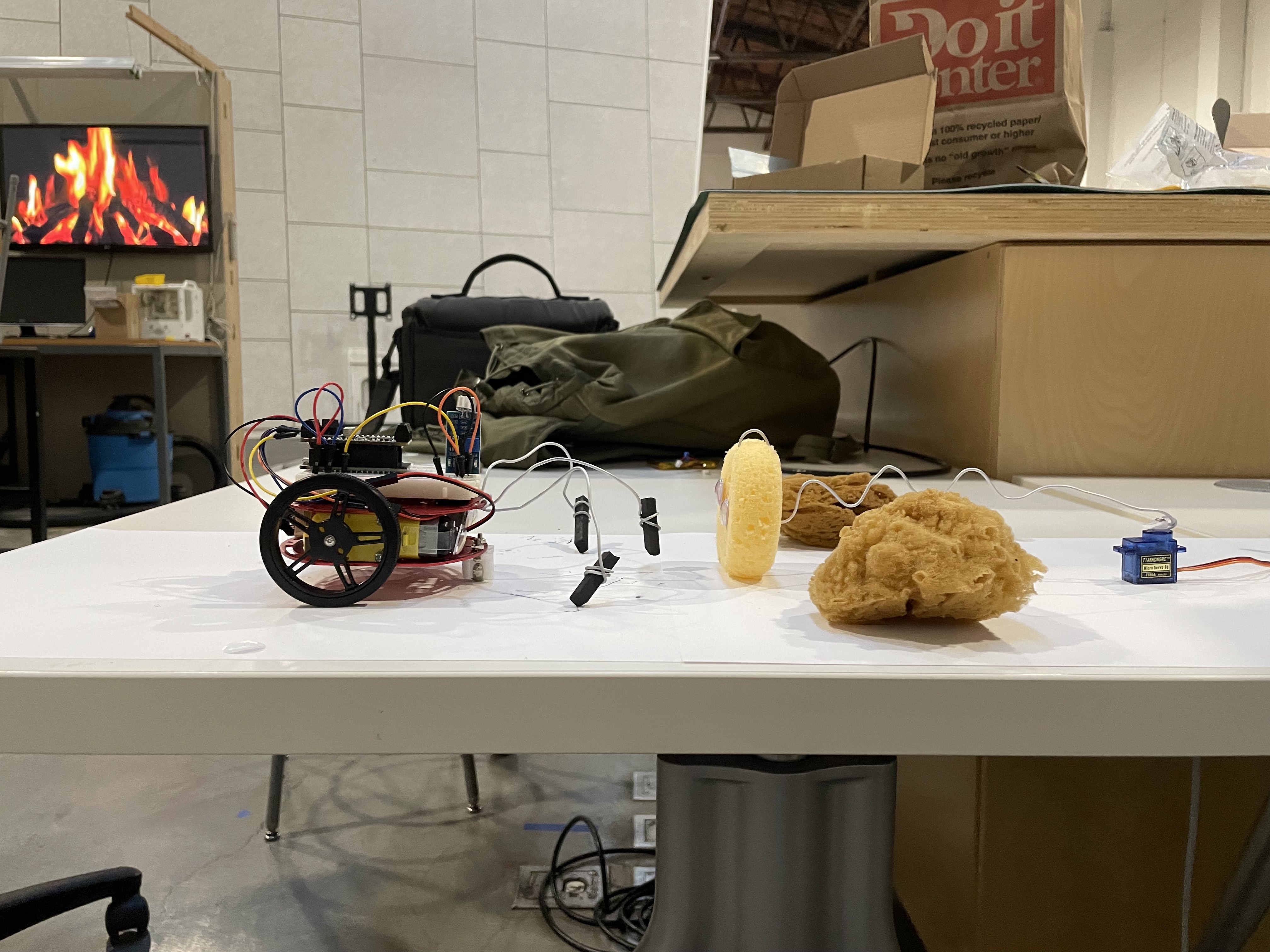
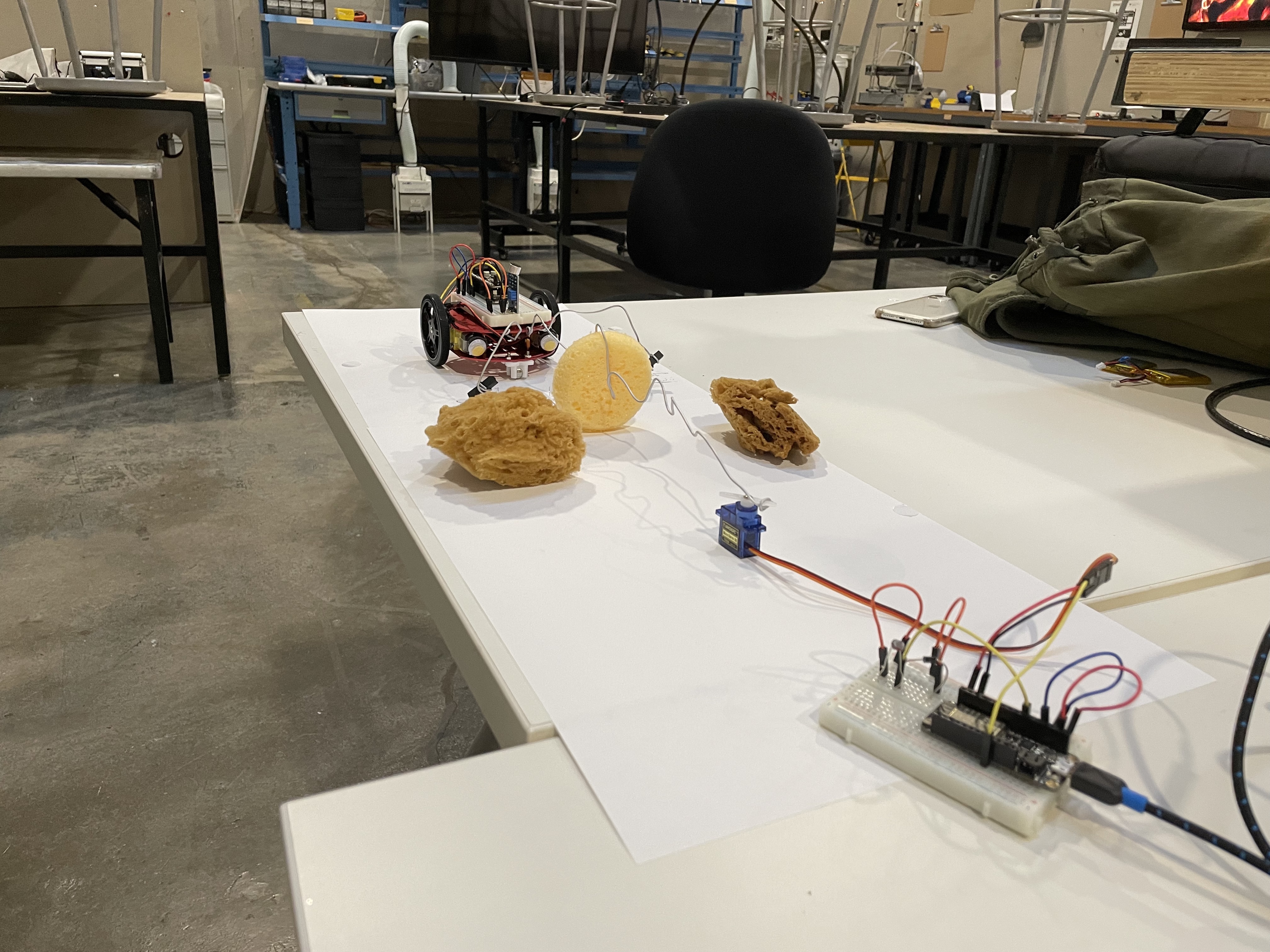
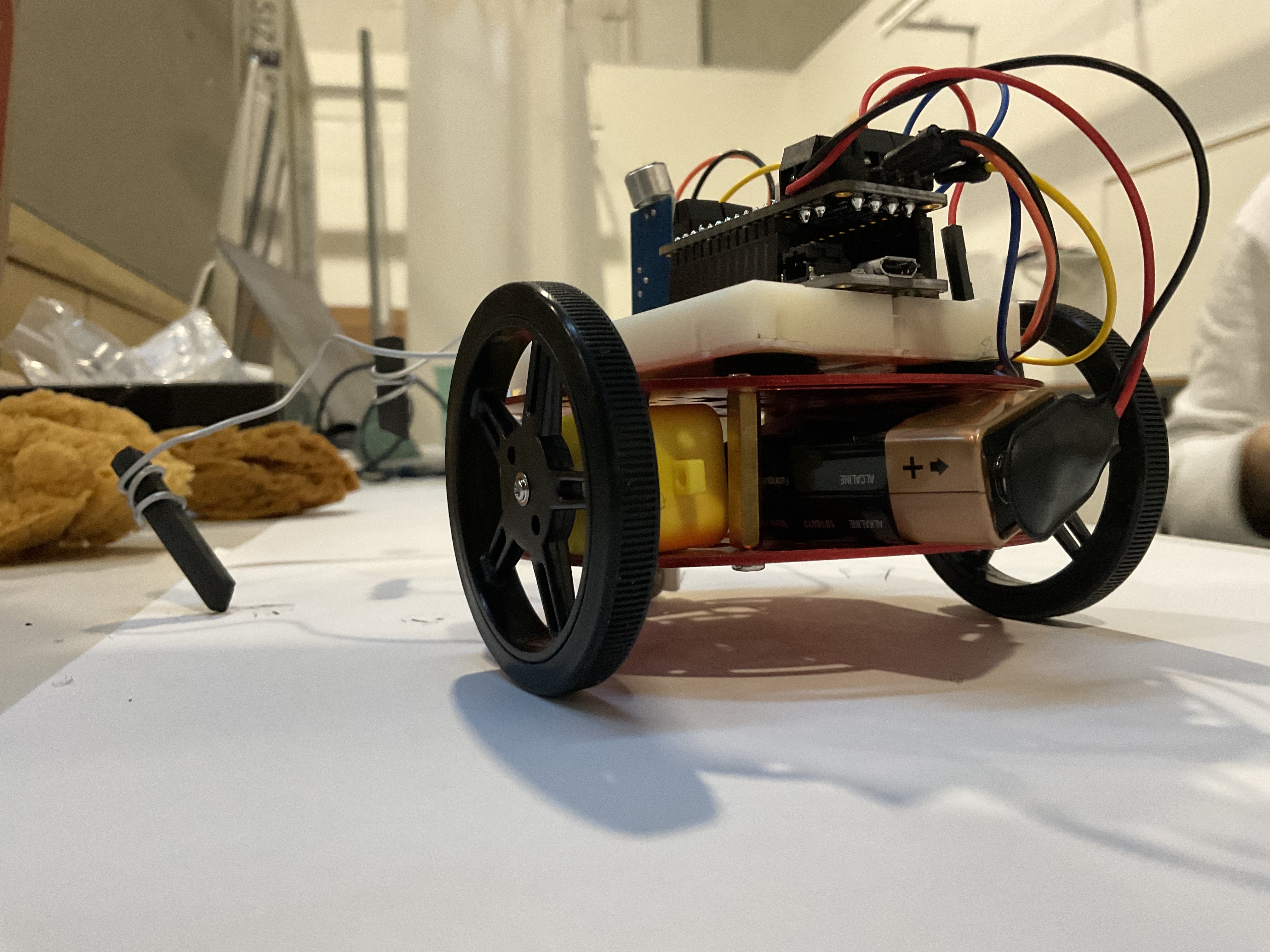
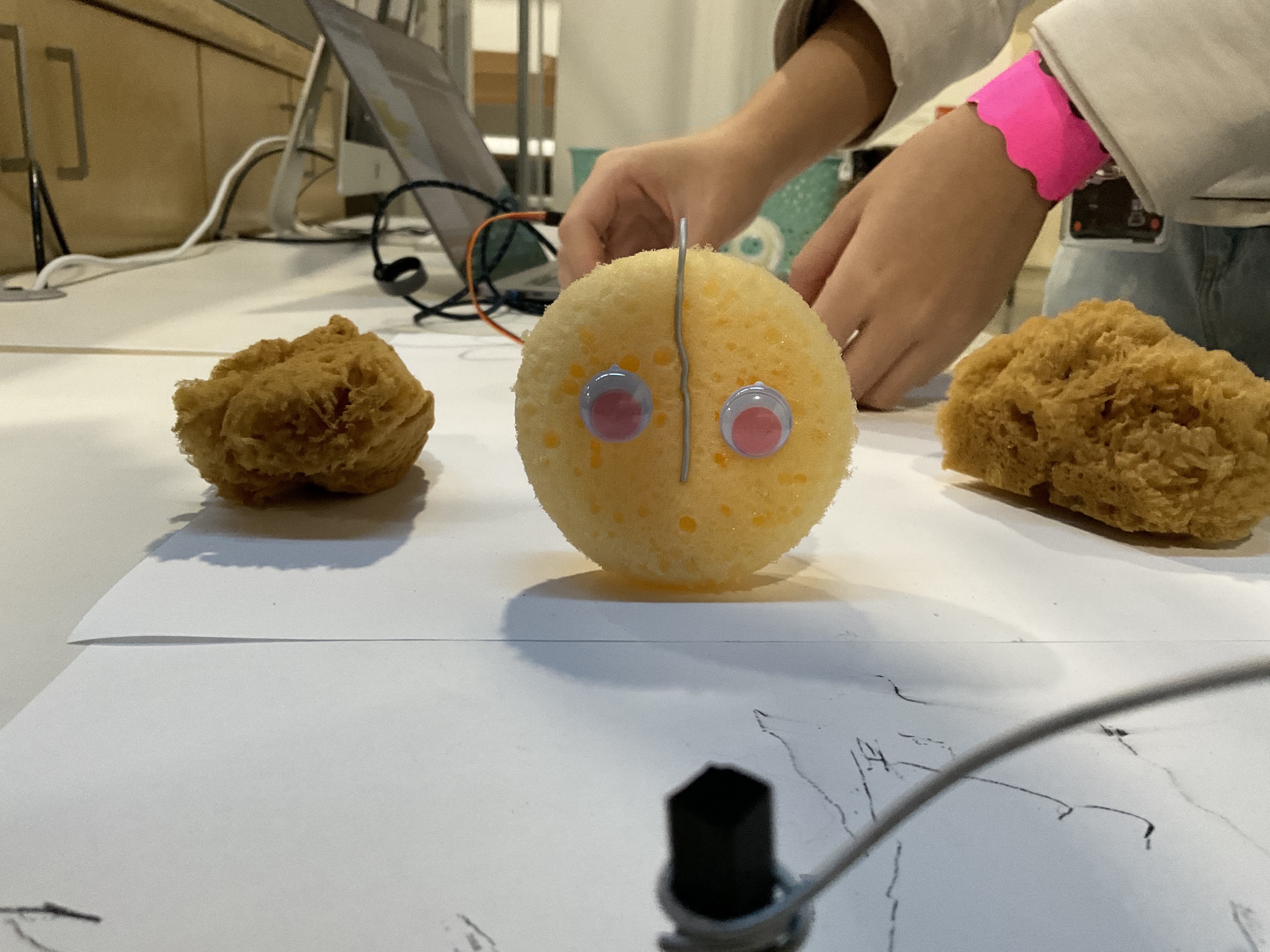
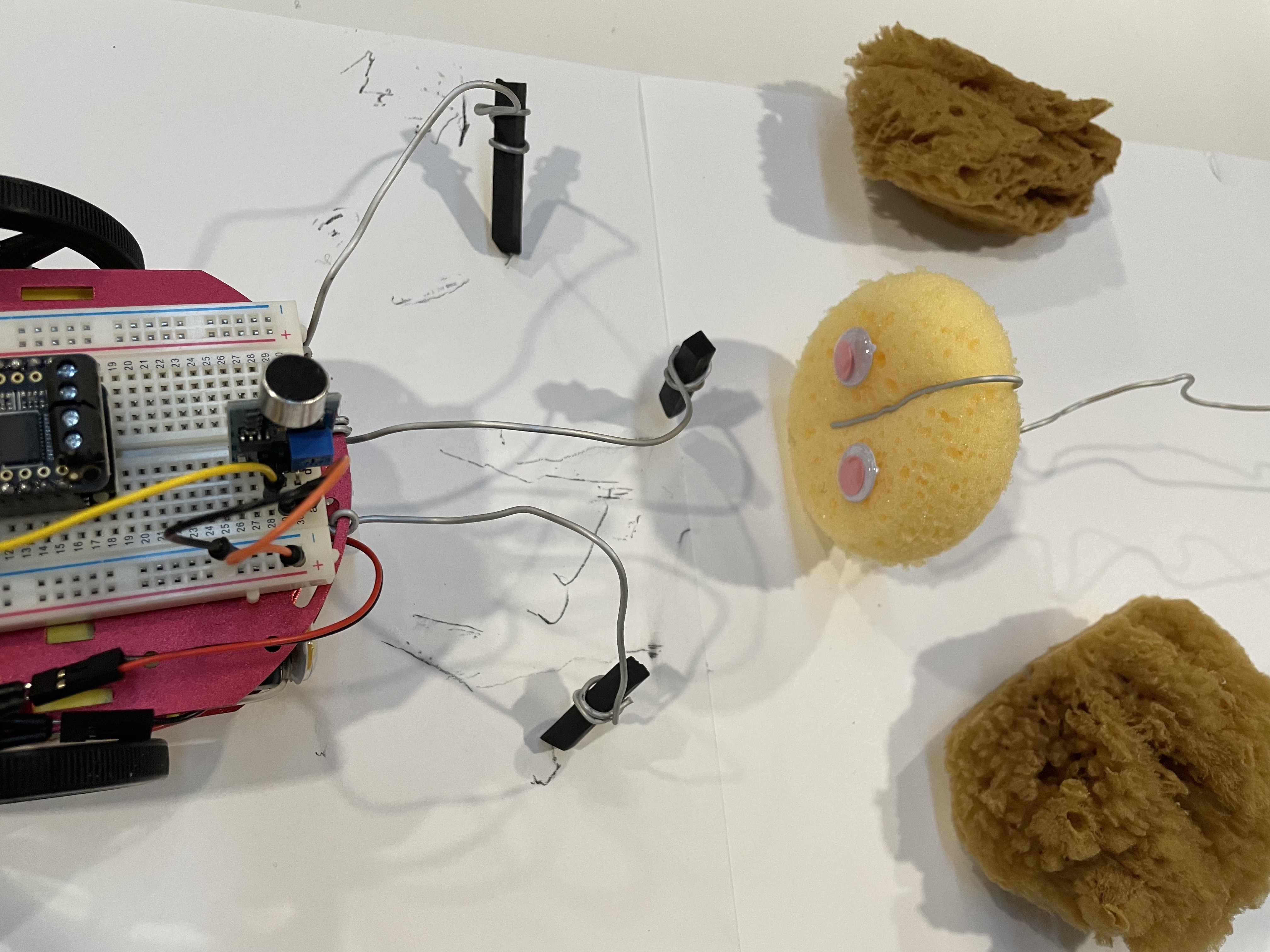
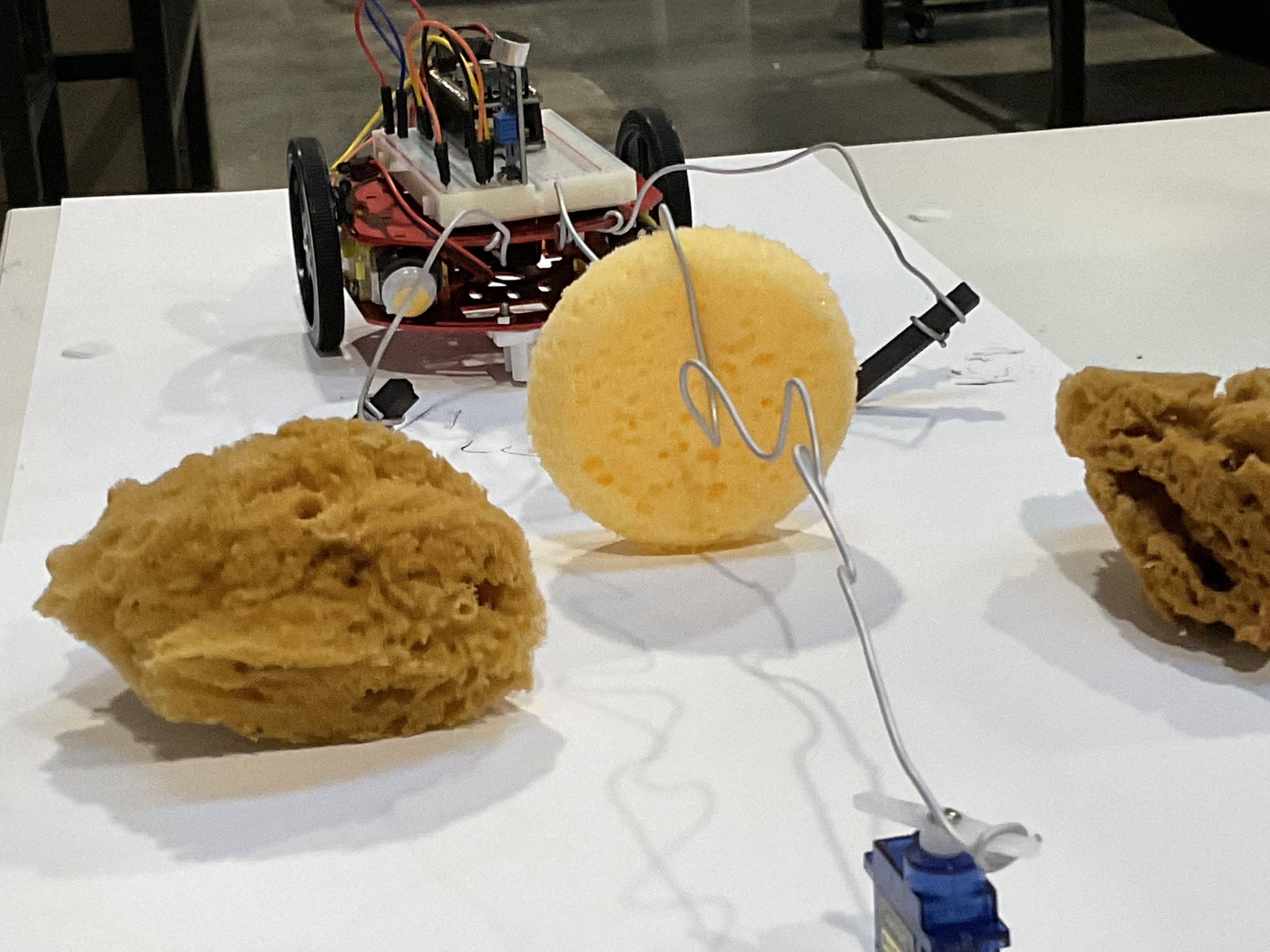
The creatures are designed to live in the same environment, they depend on each other in fact. Creature A moves based on the data it receives from Creatue B’s photoreceptor. The data is transmitted using Huzzah ESP32 and Adafruit IO. Creature B also reacts to the sound levels that Creature B detects using its small microphone. When the sound data is received by Creature B’s ESP32 it activates the servo motors attached to erasers. When these two move they work together and opposite one another.
Project Brief:
Working with a partner you will construct two electronic beings capable of percieving some aspects of the environment around them. Use whatever sensors are necessary to create their "worldview." Then you will need to connect them into a network that would enable them to communicate their findings, and respond to the communications of their counterpart.
Designed by Yue Xi and Alan Amaya
2021